VOKASI NEWS – Sistem sortir otomatis berbasis lengan robot articulated dengan deteksi YOLOv8 mampu mengidentifikasi dan mengklasifikasikan kemasan susu rusak secara real-time.
Teknologi dan informasi yang berkembang pesat mendorong industri untuk mengintegrasikan sistem otomasi demi efisiensi dan konsistensi kualitas. Ha ini berlaku terutama dalam pengemasan produk yang mempengaruhi nilai jual dan minat konsumen. Dalam industri susu, kerusakan kemasan menjadi masalah krusial, sebesar 21,51% kerusakan kemasan merupakan penyumbang dari total ketidaksesuaian produk, menunjukkan urgensi pengendalian mutu yang lebih baik.
Penelitian ini hadir untuk mengatasi masalah tersebut dengan mengembangkan sistem sortir otomatis menggunakan lengan robot articulated yang dipadukan dengan metode deteksi YOLOv8. Inovasi ini bertujuan menggantikan kontrol kualitas manual yang rentan kesalahan manusia. Sistem ini diharapkan mampu mengidentifikasi dan mengklasifikasikan kemasan susu yang cacat secara real-time, meningkatkan akurasi inspeksi, serta efisiensi dalam proses sortir. Oleh karena itu, penelitian ini sangat mendesak untuk meningkatkan mutu produk, mengurangi kerugian, dan mengoptimalkan proses produksi dalam industri susu.
Keunggulan YOLOv8 Dalam Menganalisis Kemasan
Penerapan YOLOv8 pada lengan robot articulated memberikan keunggulan signifikan dalam sistem penyortiran otomatis kemasan susu. Keunggulan utamanya adalah kemampuannya sebagai detektor tahap tunggal berbasis regresi yang mampu mendefinisikan kelas objek secara langsung dari nilai piksel. Selain itu juga memungkinkan deteksi kerusakan kemasan seperti penyok atau retak secara real-time. YOLOv8 juga menjadikan sistem untuk mengklasifikasikan kemasan secara otomatis ke dalam kategori layak atau tidak layak edar.
Hal ini kemudian digunakan sebagai perintah kontrol untuk menggerakkan lengan robot serta pada lengan robot akan menyortir kemasan rusak dan kemasan baik akan diletakkan pada tempat yang berbeda. Dengan metode augmentasi data, termasuk transformasi geometri dan warna, kinerja model YOLO dapat dioptimalkan, yang dinilai berdasarkan jumlah deteksi serta metrik evaluasi seperti AP, mAP, recall, dan precision. Oleh karena itu, integrasi YOLOv8 pada lengan robot articulated menjadi solusi aplikatif yang efektif untuk meningkatkan efisiensi dan akurasi proses inspeksi kemasan dalam industri pangan.
Implementasi Lengan Robot Articulated Terbukti Dapat Menyortir Kemasan
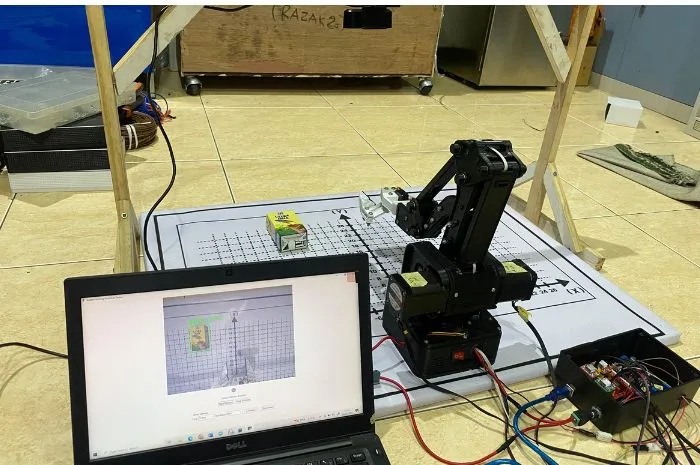
Penelitian ini menggunakan metode pengembangan dan implementasi sistem sortir otomatis untuk kemasan susu. Alurnya dimulai dengan deteksi kerusakan pada kemasan susu menggunakan metode You Only Look Once versi 8 (YOLOv8) secara real-time. Setelah terdeteksi, sistem akan mengklasifikasikan kemasan tersebut ke dalam kategori layak atau tidak layak edar. Hasil kualifikasi ini kemudian digunakan sebagai perintah kontrol untuk menggerakkan lengan robot articulated. Lengan robot berfungsi sebagai aktuator penyortiran yang akan memindahkan kemasan ke area sortir yang sesuai.
Hasil penelitian menunjukkan bahwa intensitas cahaya dan ketinggian kamera berpengaruh signifikan terhadap akurasi sistem penyortiran. Akurasi tertinggi 80% dicapai pada intensitas cahaya 247-393 lux dan ketinggian kamera 30 cm, menunjukkan pentingnya pencahayaan dan jarak optimal untuk deteksi yang akurat. Waktu sortir rata-rata berada di bawah 15 detik per sampel, menunjukkan efisiensi sistem yang baik untuk lini produksi kecepatan sedang.
Mekanisme Kerja YOLOv8, Program GUI beserta Arduino Uno
Mekanisme kerja sistem dimulai dengan program GUI (Graphical User Interface) yang berfungsi sebagai antarmuka pengguna untuk memantau dan mengontrol proses. Kamera akan menangkap citra kemasan susu dan mengirimkannya ke modul YOLOv8. YOLOv8 kemudian menganalisis citra tersebut untuk mendeteksi adanya kerusakan pada kemasan, seperti penyok atau retak. Setelah deteksi dilakukan, YOLOv8 akan mengklasifikasikan kemasan sebagai “baik” atau “rusak” berdasarkan hasil analisis visualnya. Hasil kualifikasi ini kemudian diteruskan sebagai data atau sinyal kontrol ke mikrokontroler Arduino Uno.
Arduino Uno menerima sinyal dari YOLOv8 yang berisi informasi klasifikasi kemasan. Berdasarkan informasi tersebut, Arduino Uno akan memproses dan mengeluarkan perintah kontrol yang sesuai untuk menggerakkan lengan robot. Lengan robot articulated akan bergerak sesuai perintah, memindahkan kemasan yang terdeteksi rusak ke area sortir khusus untuk kemasan cacat. Sementara itu, kemasan yang dinyatakan baik akan diteruskan ke jalur produksi selanjutnya atau area penyimpanan produk yang layak edar. Seluruh proses ini memastikan bahwa hanya kemasan susu berkualitas baik yang lolos dari sistem penyortiran otomatis ini, meningkatkan efisiensi dan akurasi dalam kontrol kualitas.
BACA JUGA: [Robot SCARA Pintar Sebagai Solusi Efisien Sortir Botol Obat]
***
Penulis: Revansa Arya Tivano
Editor: Oky Sapto Mugi Saputro